Phasengang von Filterschaltungen
Der Phasengang beschreibt, wie sich der Winkel (die Phasenverschiebung) zwischen Eingangs- und Ausgangssignal in Abhängigkeit von der Frequenz verändert.
Was ist die Phase?
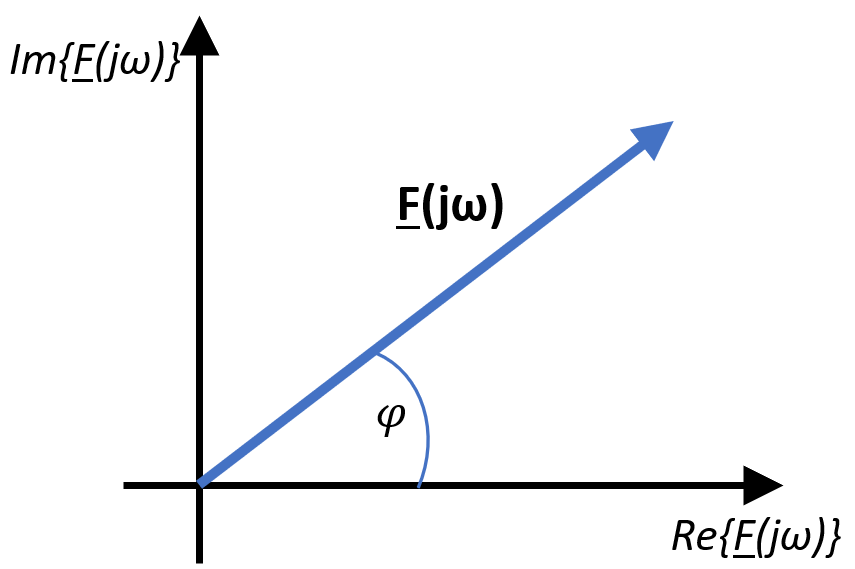
Die Phase \(\varphi\) gibt den Winkel bzw. die zeitliche Verschiebung zwischen dem Eingangssignal und dem Ausgangssignal einer Schaltung an. Sie wird aus der komplexen Übertragungsfunktion \(\underline{F}(j\omega)\) berechnet.
In der komplexen Zahlenebene lässt sich jeder Zeiger durch seinen Realteil (x-Achse) und Imaginärteil (y-Achse) darstellen. Der Winkel zur reellen Achse ist die Phase.
Die allgemeine Formel für die Phase lautet:
Bei einem Bruch aus zwei komplexen Zahlen (Zähler und Nenner) kann die Phase auch als Differenz der Einzelwinkel berechnet werden:
Dabei steht Z für Zähler und N für Nenner der Übertragungsfunktion.
1. RC-Tiefpass
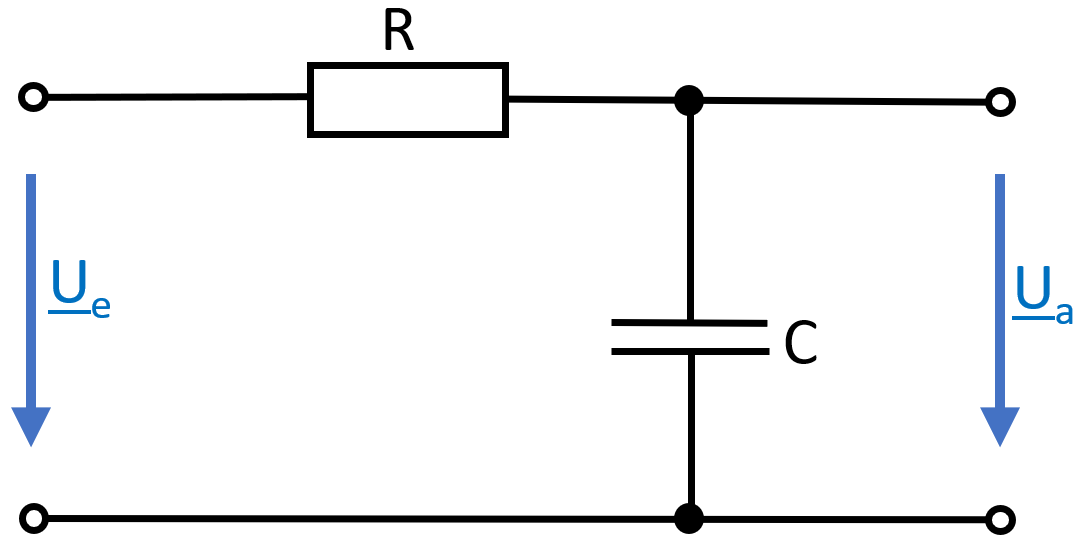
Typ: Kapazitiver Tiefpass
Bauteile: Widerstand R in Serie, Kondensator C parallel
Übertragungsfunktion: \(\underline{F}(j\omega) = \dfrac{1}{1 + j\omega RC}\)
Herleitung der Phase
Wir starten mit der Übertragungsfunktion und identifizieren Zähler und Nenner:
Zähler:
Nenner:
Nun setzen wir in die Formel für die Phase ein:
- Bei \(\omega \to 0\): \(\varphi = -\arctan(0) = 0°\) — Eingang und Ausgang sind in Phase.
- Bei \(\omega = \omega_g = \frac{1}{RC}\): \(\varphi = -\arctan(1) = -45°\) — Grenzfrequenz.
- Bei \(\omega \to \infty\): \(\varphi \to -90°\) — maximale Nacheilung des Ausgangssignals.
2. CR-Hochpass
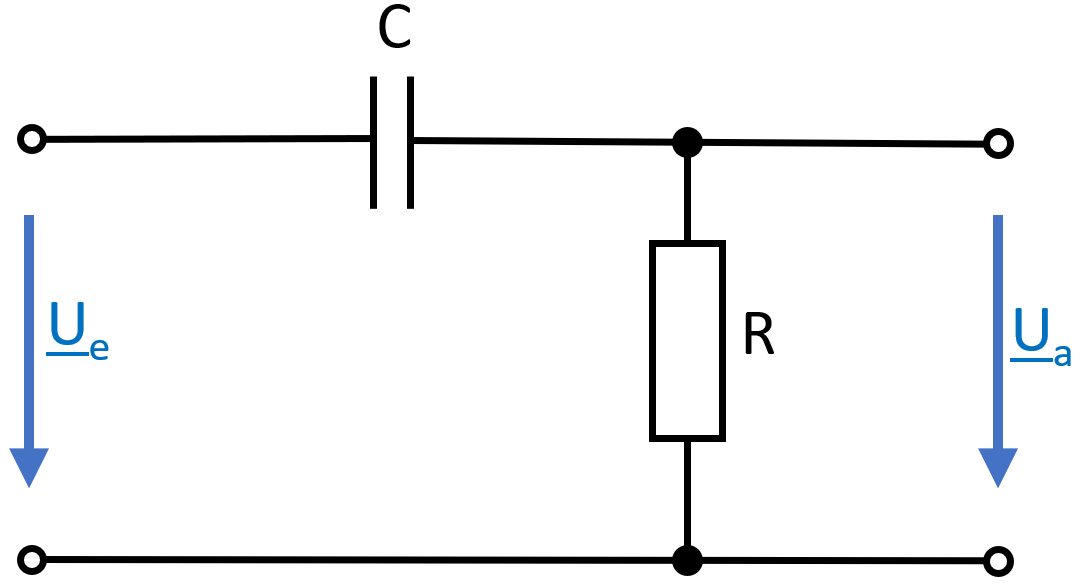
Typ: Kapazitiver Hochpass
Bauteile: Kondensator C in Serie, Widerstand R parallel
Übertragungsfunktion: \(\underline{F}(j\omega) = \dfrac{j\omega RC}{1 + j\omega RC}\)
Herleitung der Phase
Wir starten mit der Übertragungsfunktion:
Zähler:
Nenner:
Einsetzen in die Phasenformel:
Da der Realteil des Zählers 0 ist und der Imaginärteil positiv, ergibt der erste Arcustangens exakt \(90°\).
- Bei \(\omega \to 0\): \(\varphi = 90° - \arctan(0) = 90°\) — Ausgang eilt dem Eingang um 90° voraus.
- Bei \(\omega = \omega_g = \frac{1}{RC}\): \(\varphi = 90° - 45° = 45°\) — Grenzfrequenz.
- Bei \(\omega \to \infty\): \(\varphi = 90° - 90° = 0°\) — Eingang und Ausgang sind in Phase.
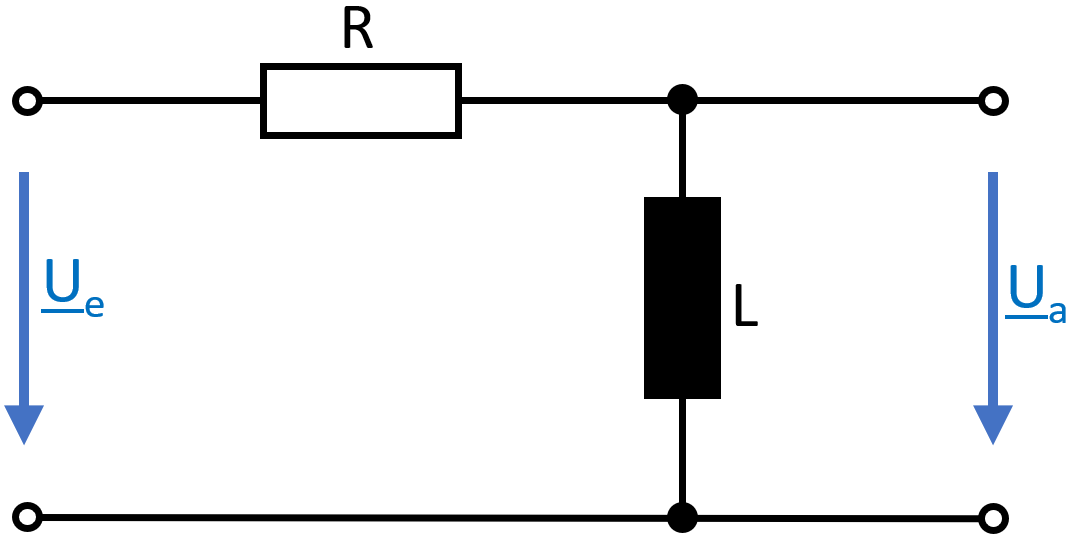
3. LR-Tiefpass
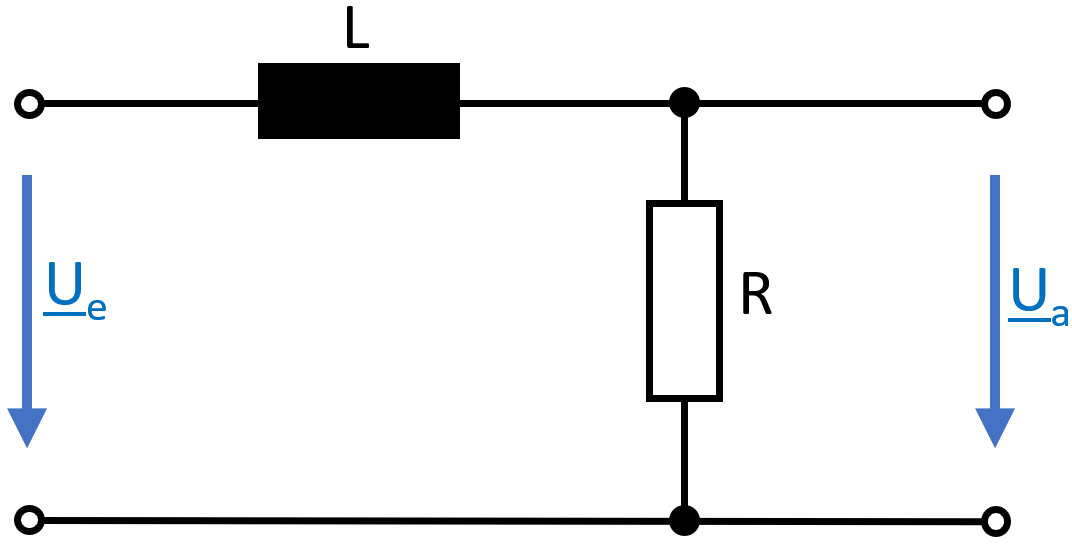
Typ: Induktiver Tiefpass
Bauteile: Spule L in Serie, Widerstand R parallel
Übertragungsfunktion: \(\underline{F}(j\omega) = \dfrac{1}{1 + j\omega \frac{L}{R}}\)
Herleitung der Phase
Die Übertragungsfunktion hat die gleiche Struktur wie beim RC-Tiefpass, nur mit der Zeitkonstanten \(\tau = \frac{L}{R}\) anstelle von \(\tau = RC\):
Zähler:
Nenner:
Einsetzen in die Phasenformel:
- Bei \(\omega \to 0\): \(\varphi = 0°\) — keine Phasenverschiebung.
- Bei \(\omega = \omega_g = \frac{R}{L}\): \(\varphi = -\arctan(1) = -45°\) — Grenzfrequenz.
- Bei \(\omega \to \infty\): \(\varphi \to -90°\) — maximale Nacheilung.
- Identisches Verhalten wie der RC-Tiefpass, nur mit der Zeitkonstanten \(\tau = \frac{L}{R}\).
4. RL-Hochpass
Typ: Induktiver Hochpass
Bauteile: Widerstand R in Serie, Spule L parallel
Übertragungsfunktion: \(\underline{F}(j\omega) = \dfrac{j\omega \cdot \frac{L}{R}}{1 + j\omega \cdot \frac{L}{R}}\)
Herleitung der Phase
Die Struktur ist analog zum CR-Hochpass:
Zähler:
Nenner:
Einsetzen in die Phasenformel:
Da der Realteil des Zählers 0 ist und der Imaginärteil positiv, ergibt der erste Arcustangens exakt \(90°\).
- Bei \(\omega \to 0\): \(\varphi = 90° - \arctan(0) = 90°\) — maximale Voreilung.
- Bei \(\omega = \omega_g = \frac{R}{L}\): \(\varphi = 90° - 45° = 45°\) — Grenzfrequenz.
- Bei \(\omega \to \infty\): \(\varphi = 90° - 90° = 0°\) — keine Phasenverschiebung.
- Identisches Verhalten wie der CR-Hochpass, nur mit der Zeitkonstanten \(\tau = \frac{L}{R}\).
Zusammenfassung
| Schaltung | Phasenformel | \(\omega \to 0\) | \(\omega_g\) | \(\omega \to \infty\) |
|---|---|---|---|---|
| RC-Tiefpass | \(-\arctan(\omega RC)\) | 0° | -45° | -90° |
| CR-Hochpass | \(90° - \arctan(\omega RC)\) | +90° | +45° | 0° |
| LR-Tiefpass | \(-\arctan(\omega \cdot \frac{L}{R})\) | 0° | -45° | -90° |
| RL-Hochpass | \(90° - \arctan(\omega \cdot \frac{L}{R})\) | +90° | +45° | 0° |